

飞行器三维路径规划
1.概述
空间管控问题是军航、民航、通航以及无人机航空业界备受关注的问题。随着飞行器数量越来越多,特别是随着低空领域的开放,空管压力越来越大。飞行器运动规律变化复杂,航路规划的计算遇到瓶颈,传统方法普遍以经纬度为基础,通过解算三维曲线方程加安全裕度的方法,来实现对空间对象的航路规划和管控,计算复杂度高,已无法适应飞行器快速增多的变化。方案基于北斗网格码进行三维路径的规划,有效降低计算复杂度,使空间管控更加实时、高效。
2.解决方案
用静态立体网格承载三维空间信息,时间维作为变量,将空间内有无人机的网格标记为1,没有的标记为0;在三维静止空间中,根据无人机之间安全飞行距离和飞行时间变量,找到任意一条和现有运动目标静止轨迹(时空轨迹)不相交的立体网格直线(曲线)区域,反向转换成无人机在三维立体空间的运动状态,即可规划出任意动态的无人机飞行路径,并能将飞行空域的利用率达到最大。
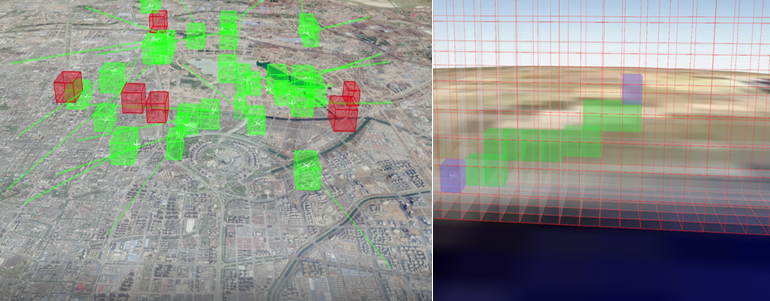
图1 三维路径规划示意图
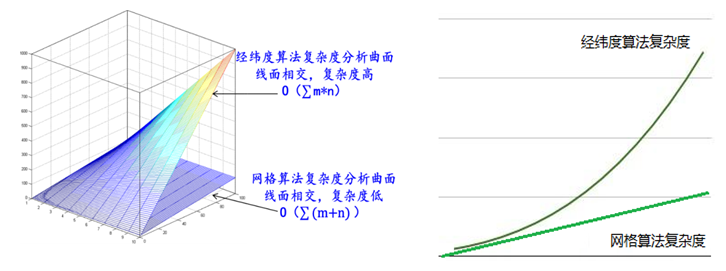
图2 计算复杂度对比
3.优势特点
(1)将复杂的浮点运算问题变成一个空间网格的匹配问题,空间飞行规划计算效率提升10倍以上;
(2)保持空间计算效率的平衡,算法复杂度呈线性变化,不随空间对象的数量、分布及运动规律的变化而变化;
(3)空域利用率提升1倍以上;
(4)具有全空域性,支持整个地球空间的空间管控。



